Record & Replay
Overview
SENSR-I supports recording feature that saves raw input streams of the sensors into a file. This file can be used to replay the recorded data at a later time.
Purpose
This is useful for following purpose:
- To check the data and perform parameter tuning in a separate space without physical sensor connections
- To store the data for archiving
- To provide the data as a reference to get technical support from Seoul Robotics
Saved location
The recorded file will be saved in /opt/seoulrobotics/rosbags folder of each Algo node machine.
For example, if you record the data in the setup of Algo node A and B in Machine 1 and Algo node C in Machine 2, the recorded files will be saved as below:
- Data of Algo node A and B under
/opt/seoulrobotics/rosbagsof Machine 1 - Data of Algo node C under
/opt/seoulrobotics/rosbagsof Machine 2
How to Record
SENSR allows to record data in the rosbag format.
This feature can be supported only with live sensors. Rosbag Recording is disabled if you use recorded data to run SENSR-I. The feature is accessible in project mode or Runtime mode. If a first recording failed in Runtime mode, it is then recommended recording data in Project mode to reduce the computing power consumed by SENSR.
Steps to use this is as below:
Click
Recordicon on the header orRecording > Rosbag Recordingon the menu barSet configuration of recording.
File name: The name will be used for distinguishing the recorded file. The folder with input name will be created under/opt/seoulrobotics/rosbagsfolder of each Algo node machine.- filename has the following restrictions:
- Filename must not contain spaces.
- Special characters cannot be used in filename. (except "_")
- Filename must start with an alphabet.
- filename has the following restrictions:
Max Recording Time: This is an optional field. So if you want limit the maximum recording time, you can set the value by ticking the checkbox. Once SENSR has been recording for this amount of time, it automatically stops the recording and saves it. The recording can be manually stopped at any point before that, but this parameter is intended to limit the recording time in case there is limited space of storages or if the user wants to record the data of a specific amount of time.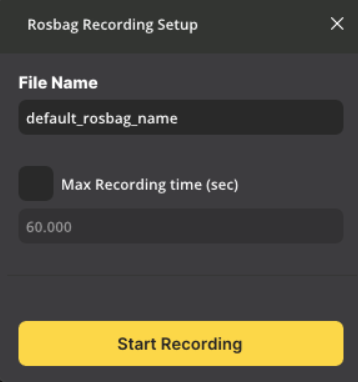
Click
Start Recordingbutton to start recording. The recording window will show information about the recording and percentage of recorded time in comparison with Max Recording Time, if it's set.Press the
Stop Recording buttonat any time will stop the recording and save to file. The recording system also keeps track of the available disk space and automatically turns off the recording if there is not enough space remaining.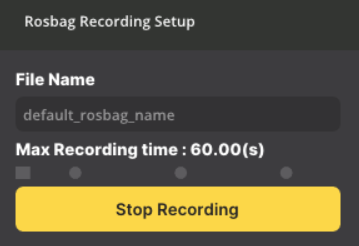
Replaying
Replaying recorded data saved through Rosbag Recording is not supported as a separate function. When setting Algo node in Project Setup, replay is possible by loading .bag file.
While replaying rosbags, you can focus on specific part if needed:
In Runtime mode navigate to
Settings > Advanced features > Customize Rosbag Playback,Click and drag the cursors on the left and right to define which portion of the rosbag to play,
Click on
Apply.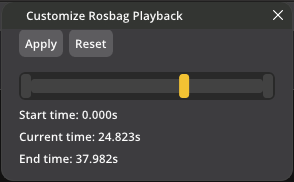
Note: If you want to reset the playing range, in Settings > Advanced features > Customize Rosbag Playback, select Reset.
Master Node Replay
If a rosbag file has been saved using Advanced Recording or Anomaly Recording with the Master Node Record option enabled, you can use Master Node Replay. This feature allows you to recreate the same output that was present in Live Runtime mode.
How to use
- Navigate
Tool > Master Node ReplayinProject Setupmode. - Select the rosbag file which is saved using
Advanced RecordingorAnomaly Recordingwith theMaster Node Recordoption enabled. The file will be located under/opt/seoulrobotics/recording/<recording-name>/master_datafolder of the Master node machine. - Click
Startto begin the replay. This mode operates similarly to theRuntimemode, where you can retrieve output data.
Transfering the recorded data
SENSR's recording features save the recorded data in the machine where each Algo node is running. To enable the user to easily transfer the recorded data, SENSR provides Transfer Recordings option.
But if there's any issue in transferring the recorded data, you can continue it in Settings > Advanced Features > Recording Transfer by clicking failed transfer item.