Troubleshooting
Software issues
[Algorithm][W] Lidar subscriber received point cloud with old time information(delta_t < 0)
| Console Message | [Algorithm][W] Lidar subscriber received point cloud with old time information(delta_t < 0) |
|---|---|
| Situation Description | There's no pointcloud showing and warning message like above comes out repetitively. |
| Cause | This warning message is displayed when the timestamp of the most recently received pointcloud is older than the timestamp of the pointcloud which has been received before. This can happen for a variety of reasons, but it is suspected that the system clock you are using goes back or rewinds for some reasons. |
| Troubleshooting | - Change the System Clock back to the real time. If it is solved in this way, SENSR-I can be used again without interruption of data processing. - (It can also be used when the above method does not solve the problem.) Return to Project Setup Mode and then back to Runtime Mode again. |
[W] Output socket overflows. A new message will be dropped until the socket becomes normal.usually occur network bandwidth is low.
| Console Message | [W] Output socket overflows. A new message will be dropped until the socket becomes normal.usually occur network bandwidth is low. |
|---|---|
| Situation Description | Websocket connection is disconnected after showing the warning messages as above. |
| Cause | This warning message is displayed when websocket connection is made but receiving device is too slow to process the streaming message or network connection is bad. |
| Troubleshooting | You need to make sure that when websocket connection is made, receiver should process the data from sender. It is best practices to separate the parsing and processing of incoming data in your own threads with information being passes through a Mutexed FIFO. You can also check SystemHealth status is OUTPUT_BUFFER_OVERFLOW = 5 from the streaming message when this situation occurs. |
[Framework][E] Cuda error 999: unknown error
| Console Message | [Framework][E] Cuda error 999: unknown error |
|---|---|
| Situation Description | While restarting algo node, error message above is shown and algo node failed to start. |
| Cause | - |
| Troubleshooting | This is a known issue. Temporarily solution for this now is just re-starting the machine. |
Velodyne's unstable FOV
| Console Message | - |
|---|---|
| Situation Description | Velodyne LiDAR is connected, but its FOV keeps changing and rotating like video below. |
| Cause | It is suspect that Pointclouds are not stable. |
| Troubleshooting | 1. Type Lidar IP address on your internet browser. (you can check the IP address with Wireshark) 2. Check if Return Type is Strongest. If not, change it to Strongest. 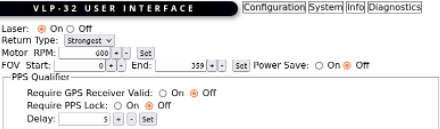 |
Hardware or Physical installation issues
LiDAR connection is not good but it's hard to find the root cause.
| Console Message | - |
|---|---|
| Situation Description | Connection between LiDAR and LPu is made, but it's hard to figure out why connection is not good. |
| Cause | - |
| Troubleshooting | Follow the instructions here step by step to investigate. |