LiDAR & LPU Connection
Before deploying SENSR, the hardware components such as LiDARs, LiDAR Processing Unit (LPU), and network devices must be set up and installed. This chapter aims to provide guidelines for typical configurations. For more complex or specific setups, please contact support@seoulrobotics.org.
Define network configuration
General considerations
The network configuration shall first be defined using the list of equipment based on the hardware requirements. Unless specified by your Network Administrator, please define your network configuration using the principles below:
- All elements shall be set with a static IP address,
- For a given algo node, all elements (LPU, sensors) shall be on the same subnet,
- All elements within the same subnet shall be connected using network switches.
Network architectures
Different network architectures can be adopted based on the topology of the site(s) where SENSR should be deployed.
The illustrations below are examples based on the scale and use cases to be deployed. The IP addresses provided are only used as an illustration. After selecting the architecture, define the IP range to use and assign an IP address to each component:
LPU: 192.168.1.2
LiDAR 1: IP 192.168.1.100
LiDAR 2: IP 192.168.1.101
...
After defining your architecture, please jump to the Configuration section.
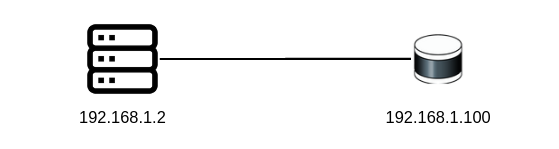
Direct LPU - LiDAR Connection
This architecture is used on configurations where a single LiDAR is connected to an LPU.
Typical cases:
- POC for trial
- Highway ramp monitoring
Connection with up to 4 LiDARs
This architecture is used on configurations where a site is equipped with up to 4 LiDARs.
Typical cases:
- Road intersection monitoring
- Roundabout monitoring
- One room monitoring

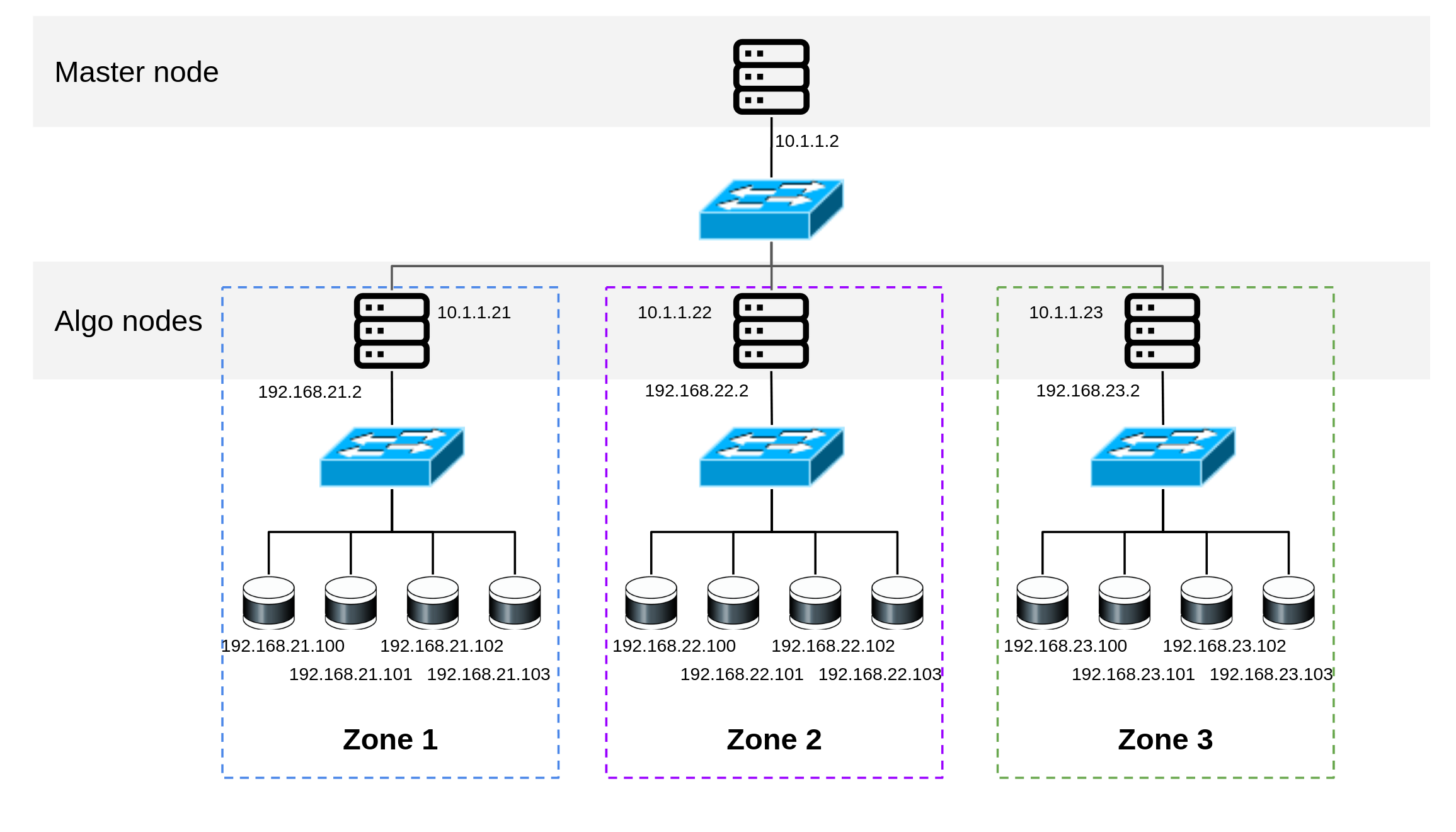
Multiple zones on one site
This architecture is used on large single sites where a significant number of LiDARs are installed. LiDARs must be connected to separate LPUs depending on their location (algo nodes) to distribute the processing. The algo nodes must also be connected to a master node managing the overall system.
Typical cases:
- Airport monitoring
- Outdoor detection for security
- Monitoring on large ITS site
Configuration
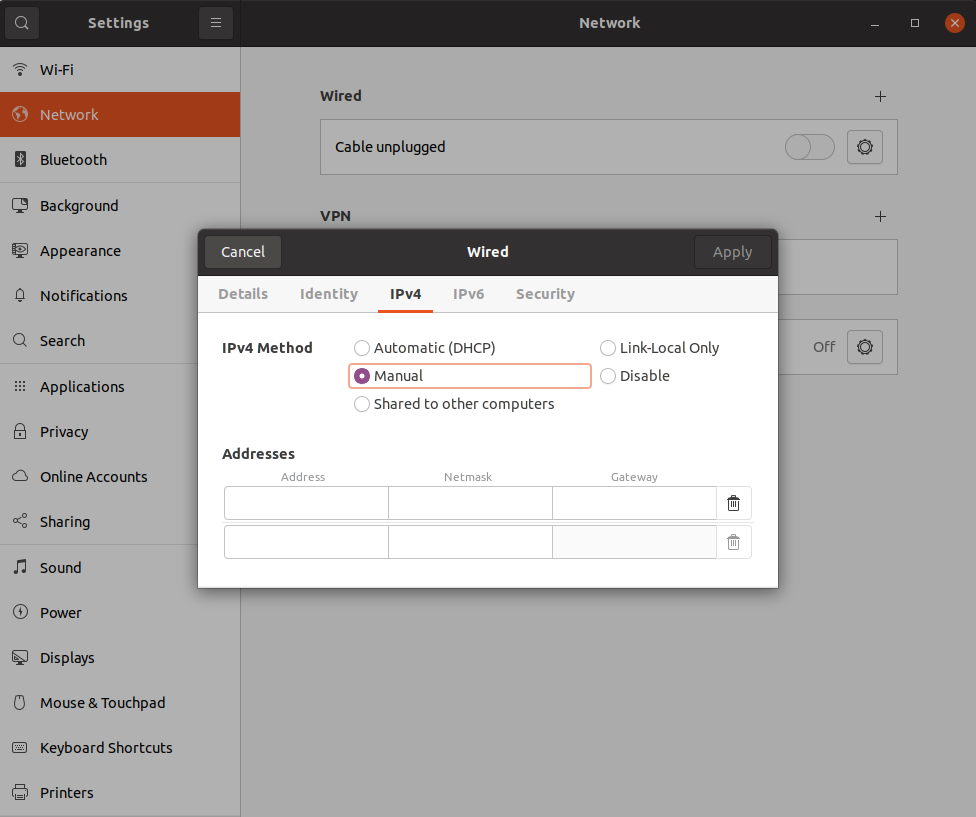
LPU
If you are using a Discovery kit, plug the line from the LPU to the LiDARs to the LAN port 2. In Ubuntu, the network settings can be set as follows:
- Navigate to Settings → Network → Wired
- On the settings Icon go to the "IPv4" tab
- Select IPv4 Method: Manual
- In Address type the address previously defined, for instance 192.168.1.2,
- In Netmask input the netmask to be used, as a first step 255.255.255.0 can be used
LiDAR
Setting network parameters
Defining the network settings of your LiDAR is manufacturer dependant, please find below links to instructions for commonly used lidars:
Finding LiDAR network parameters
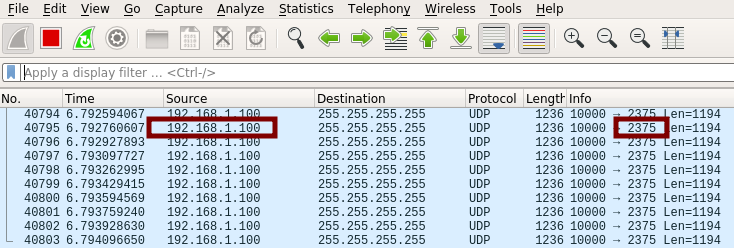
In case the current network settings of a LiDAR are unknown, you can use Wireshark:
- Install wireshark:
sudo apt-get install wireshark, - Connect and power the LiDAR,
- Run wireshark in sudo mode:
sudo wireshark - Select the network interface connected to the LiDAR
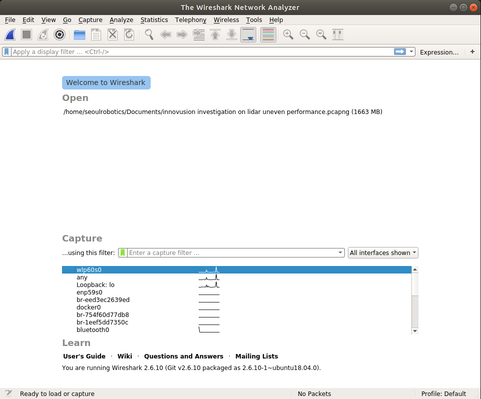
- The LiDAR's IP and port will be displayed as follows:
Network appliances
Depending on the network appliances used, some additional configuration may be necessary. Please refer to your network appliance manufacturer's instructions for further details.
Connect everything
Once all the equipment is installed:
- Connect the equipment to the network appliance
- Power the equipment
- From the LPU, try to ping each LiDAR's IP address to ensure the communication is established
ping [your-lidar's-ip-address]
Further considerations
List of ports used by SENSR
In case you use a firewall between different machines running Seoul Robotics'solutions, you will find below a summary table of the ports that must be open for SENSR to operate properly.
| Item | Port |
|---|---|
| SSH to install | 22 |
| Kubernetes | 80 |
| 6443 | |
| Web Front-end | 5000 |
| Master node to Algo node | 5056 |
| Algo node 1 ~ | 30000 ~ |
| Output message | 5050 |
| Point Cloud | 5051 |
| Log | 5057 |
| SR Launcher | 8000 |
| API | 9080 |
| License server - SENSR connection | 9001 |
| License server - Web UI | 9011 |
| LiDARs* | User-defined |
| Timesync | 319 |
| 320 |
(*)Items for which the port number can be configured