Recording
Overview
SENSR-I supports recording feature that saves raw input streams of the sensors into a file. This file can be used to replay the recorded data at a later time.
Purpose
This is useful for following purpose:
- To check the data and perform parameter tuning in a separate space without physical sensor connections
- To store the data for archiving
- To provide the data as a reference to get technical support from Seoul Robotics
Saved location
The recorded file will be saved in /opt/seoulrobotics/rosbags folder of each Algo node machine.
For example, if you record the data in the setup of Algo node A and B in Machine 1 and Algo node C in Machine 2, the recorded files will be saved as below:
- Data of Algo node A and B under
/opt/seoulrobotics/rosbagsof Machine 1 - Data of Algo node C under
/opt/seoulrobotics/rosbagsof Machine 2
How to Record
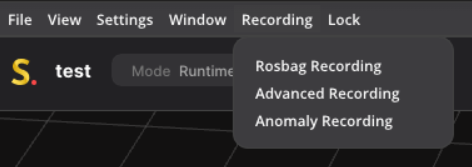
There're three features to record the data:
- Rosbag Recording
- Advanced Recording
- Anomaly Recording
You can find those features at Recording menu in menu bar, or you can click the Record icon(this is shortcut to use Rosbag Recording) on the header.

1. Rosbag Recording
This feature can be supported only with live sensors. Rosbag Recording is disabled if you use recorded data to run SENSR-I.
Steps to use this is as below:
Click
Recordicon on the header orRecording > Rosbag Recordingon the menu barSet configuration of recording.
File name: The name will be used for distinguishing the recorded file. The folder with input name will be created under/opt/seoulrobotics/rosbagsfolder of each Algo node machine.- filename has the following restrictions:
- Filename must not contain spaces.
- Special characters cannot be used in filename. (except "_")
- Filename must start with an alphabet.
- filename has the following restrictions:
Max Recording Time: This is an optional field. So if you want limit the maximum recording time, you can set the value by ticking the checkbox. Once SENSR has been recording for this amount of time, it automatically stops the recording and saves it. The recording can be manually stopped at any point before that, but this parameter is intended to limit the recording time in case there is limited space of storages or if the user wants to record the data of a specific amount of time.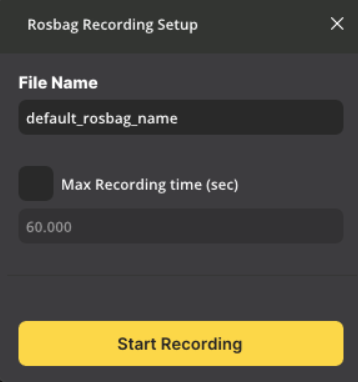
Click
Start Recordingbutton to start recording. The recording window will show information about the recording and percentage of recorded time in comparison with Max Recording Time, if it's set.Press the
Stop Recording buttonat any time will stop the recording and save to file. The recording system also keeps track of the available disk space and automatically turns off the recording if there is not enough space remaining.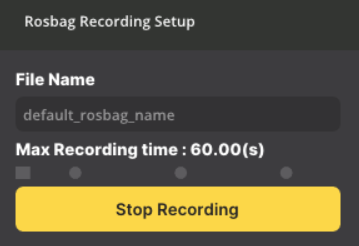
info
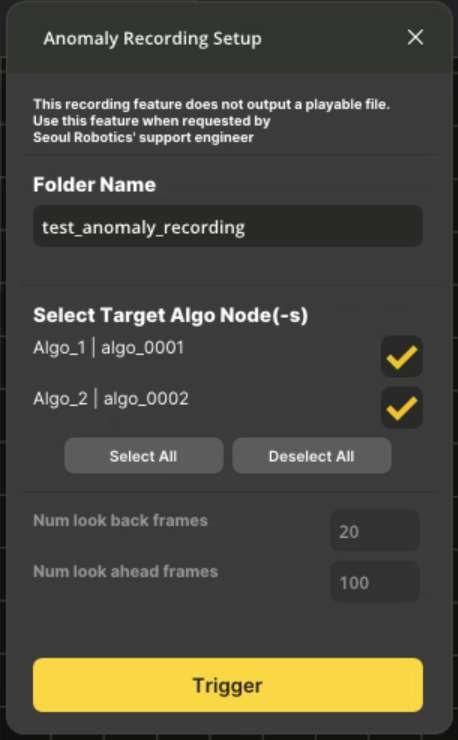
Advanced Recording and Anomaly Recording don't output file format as .bag. Users can not use recorded data of those two feature in SENSR-I. These features would be used only for customer support, since it saves more information which enables Seoul Robotics to investigate further. Please use them when requested by Seoul Robotics' Support Engineer.
2. Advanced Recording
Advanced Recording is almost the same as Rosbag Recording. The differences are that it saves the data in a different format and Circular recording is supported in Advanced Recording.
- It saves data frame by frame as
.binfiles. - If
Circular recordingis ticked on, it saves data from the frame which is process certain amount of time ago to when the recording is stopped. In other words, it doesn't save all data from the beginning of recording to give us only useful data and to save the storage space.
Step to use this is as below:
Click
Recording > Advanced Recordingon the menu barSet configuration of recording.
Folder name: The name will be used for distinguishing the recorded file. The folder with input name will be created under/opt/seoulrobotics/rosbagsfolder of each Algo node machine.Select Target Algo Node(s): Select the Algo node(s) to record.Circular recording: If this is ticked on, it saves data from the frame which is process certain amount of time ago to when the recording is stopped as described above.Circular Recording time(s): The amount of time to save data. If it is 60 seconds and clickStop Recordingat timestamp A, then data will be saved from A - 60 seconds to A. This is only available whenCircular recordingis ticked on.
Click
Start Recordingbutton to start recording.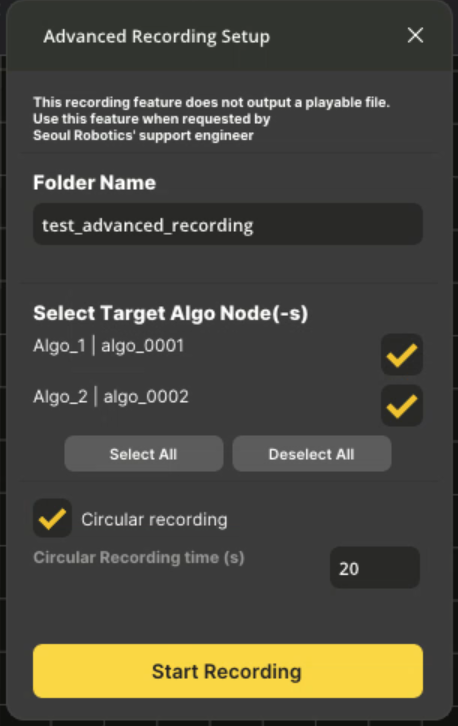
(Optional) Click
Make a Snapshotif you want to snapshot for the specific frame.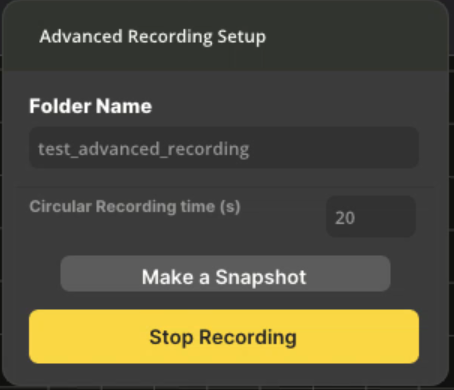
Click
Stop Recordingbutton when you want to stop recording.
3. Anomaly Recording
Anomaly Recording can be used when you want to record the data from a certain point forward or backward of a specific event (ex. when noise occurs in object recognition, when an event to be observed, such as vehicle entry) occurs. In the case of Rosbag Recording and Advanced Recording, users need to start recording in advance and continues to wait for the corresponding event to occur. After that, users need to manually Stop Recording after checking the occurrence of the event through the GUI. However, the Anomaly Recording function keeps the frame in the background and when a user discovers an event, presses the Trigger button to automatically save the data before and after that point.
Steps to use this is as below:
Tick on
Enable Anomaly Data-CollectorinSettings > General > Data Collection > Anomaly Collectorto enable SENSR to save frames in the background. And adjust values ofNum Look-Back FramesandNum Look-Forward Frames.Num Look-Back Frames: The number of frames to save before the trigger. SENSR mostly saves 10 frames per second, so if you set 10, it will save 1 second of data before the trigger.Num Look-Forward Frames: The number of frames to save after the trigger.
Click
Apply, then Algo nodes will be restarted and SENSR will keeps the frame in the background.Click
Recording > Anomaly Recordingon the menu bar.Set configuration of recording.
Folder name: The name will be used for distinguishing the recorded file. The folder with input name will be created under/opt/seoulrobotics/rosbagsfolder of each Algo node machine.Select Target Algo Node(s): Select the Algo node(s) to record.Num look back frames: It will be the same value asNum Look-Back FramesinSettings > General > Data Collection > Anomaly Collector.Num look forward frames: It will be the same value asNum Look-Forward FramesinSettings > General > Data Collection > Anomaly Collector.
Replaying
Replaying recorded data saved through Rosbag Recording is not supported as a separate function. When setting Algo node in Project Setup, replay is possible by loading .bag file. Please refer to this document.
info
Replaying multiple rosbag files using multiple Algo nodes is not supported yet. If you want to replay multiple rosbag files, please merge them into one rosbag file and use that with single Algo node. For further information, please ask Seoul Robotics' Support Engineer through support@seoulrobotics.org.