Zones
Definition
Depending on a site's topology, perception needs can vary from area to area. For instance, in a given area users may need to receive event messages, in another area users may want to completely disable all perception functions and so on.
SENSR allows to do just that through its Zones. In SENSR a set of zones is defined to drive the algorithm's behavior depending on the local perception needs.
The section below describes the types of zones offered by SENSR.
Zone types
Event Zones
An Event Zone defines an area that will trigger a specific output message when objects enter and exit it. (see Output) By default SENSR will trigger a message whenever an object (vehicle, 2 wheels, pedestrian) enters and exits the zone, additional triggers are available based on speed and loitering. (see Event Zones Additional Trigger Settings)
Exclusion Zones
An Exclusion zone defines an area where data will not be processed. Any object that enters an exclusion zone is no longer tracked and will not be part of the output stream. This can be done for a variety of reasons.
Noise
It is possible for certain seemingly static objects to create movement. Vegetation in particular can move in the wind and create false positives. If a coverage area has a known trouble spot, a manually created exclusion zone around this object can eliminate false positives in this area.
Performance
Exclusion zones can also help reduce the amount of processing needed for a given setup. If the sensors, due to their range or FOV, cover an area that does not need to be tracked, an exclusion zone will prevent any processing that could take place inside that zone. This would reduce the computing power needed for the site.
Privacy Exclusion zones can also be created to avoid tracking objects in a given area for privacy / confidentiality purposes. That way, sensors can have a line of sight in the area but tracking will be disabled there.
Static Zones
A Static zone prevents objects from being detected as part of the background and maintains them a objects over time.
For instance, in a parking lot, without static zones, the parked cars will eventually be classified as part of the background. At that point, the car's tracking will be lost and a new ID will be attributed to the car as it leaves the lot. Creating a static zone where the parked cars are will allow SENSR to continuously detect the parked cars as objects. Therefore preserving each car's tracking ID.
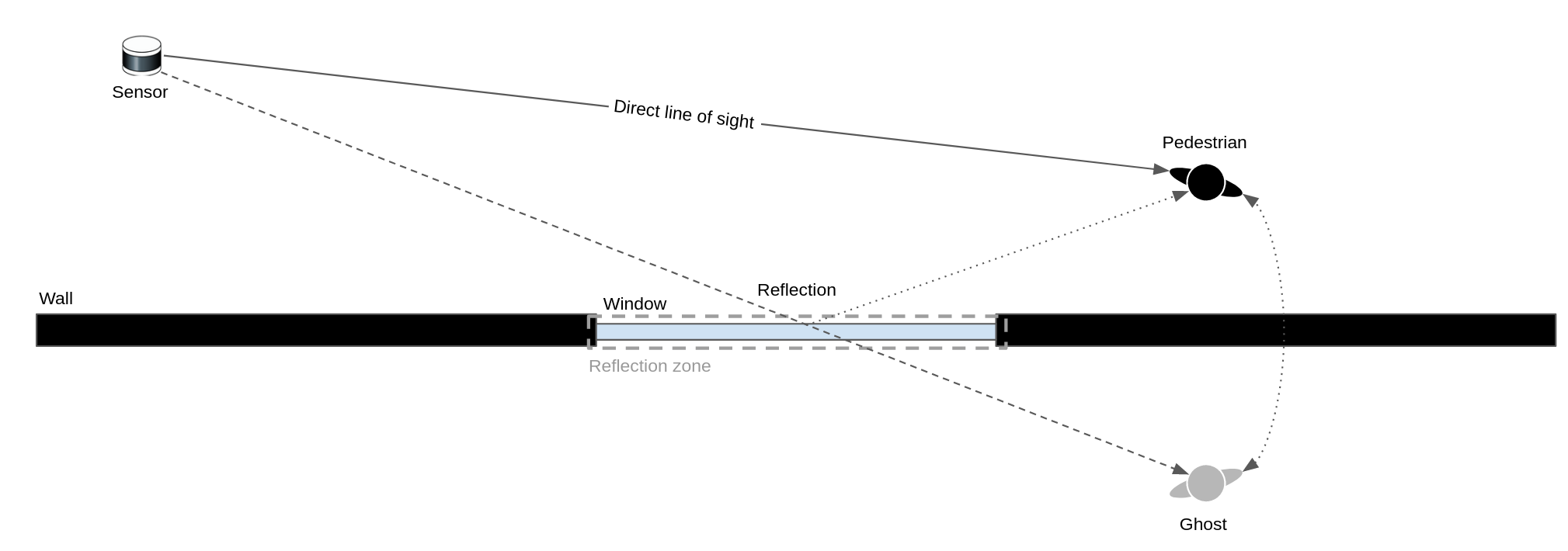
Reflection Zones
A Reflection zone defines a special area where ghost objects created by reflective surfaces are filtered out.
For instance, a sensor and a person are in the same room with a large window. The sensor has a direct line-of-sight to the person, creating an object. The sensor also has an indirect line-of-sight through a reflection off the window. The sensor is not able to differentiate a reflection from a direct line-of-sight and will provide SENSR "ghost" data points on the other side of the window.
By creating a reflection zone, SENSR will detect and discard the "ghost points".
note
Reflection zones are quadrilateral unlike the other zones all polygonal.
Map Exclusion Zones
SENSR allows calibrating LiDARs against a 3D map in a ply format. When calibrating the LiDARs, SENSR compares the 3D map's vertices against the pointcloud transmitted by the LiDARs and calibrates the LiDARs against the map.
However, in the 3D map there can be irrelevant objects or the site's geometry may have slightly changed between the time the site was scanned and the time of the calibration. Those objects complicate the auto-calibration process as the algorithm will try matching the pointcloud against them.
Map Exclusion zones allow excluding areas of the 3D map so that the auto-calibration algorithm ignores them when calibrating the LiDARs.
Background Removal zone
Background Removal Zones are special areas that help ensure that points identified as background are excluded from processing, even if the background detector isn't set to exclude them automatically.
Note: Background Zones are only used when the background detector's mark_invalid parameter is set to false, which is mostly used for autonomous driving use cases, for example.
The zone's logic is defined as follows, if a point is marked as static by the background detector is located within a Background Removal Zone, it will be marked as invalid whatever the paraneter setting. Points marked as invalid are excluded from further processing in SENSR.
For instructions on creating and managing zones, please follow the link here.