Objects
Overview
SENSR transforms lidar data into perception data, including object bounding box information such as location, size and yaw, speed and class. This section details how object attributes are represented in SENSR.
Data Attributes
Class
Leveraging proprietary algorithms, SENSR detects and classifies four types of objects:
| Object | Description | Illustration |
|---|---|---|
| Vehicles | Objects such as Cars, Buses, Trucks... | 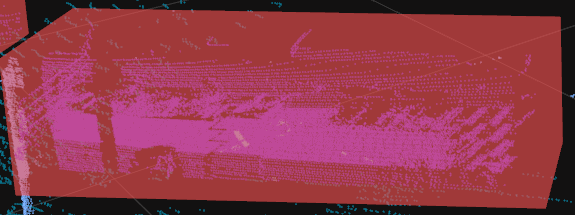 |
| 2 Wheels | Motorbikes, Bicycles... |  |
| Pedestrian | Humans | 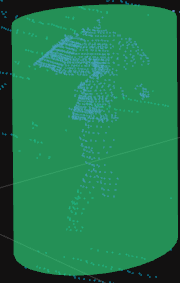 |
| Miscellaneous | Unidentified objects | 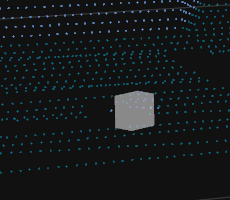 |
info
Coordinates System of SENSR
In SENSR, a 3D coordinate system is formed using the center point of the Master Node as origin. All data output from SENSR is based on this coordinate system. The center point of the Master Node can be found at the position of xyz axis in Project Setup mode. (Note that if you move the position of the Algo node, be careful not to confuse the local center point of the Algo node with the center point of the Master Node.)
If integration with another Referential System is required, you either need to move the positions or rotations of the Algo nodes and LiDARs within SENSR to match that system, or transform the coordinates or vectors of the Output data using sets of reference points.
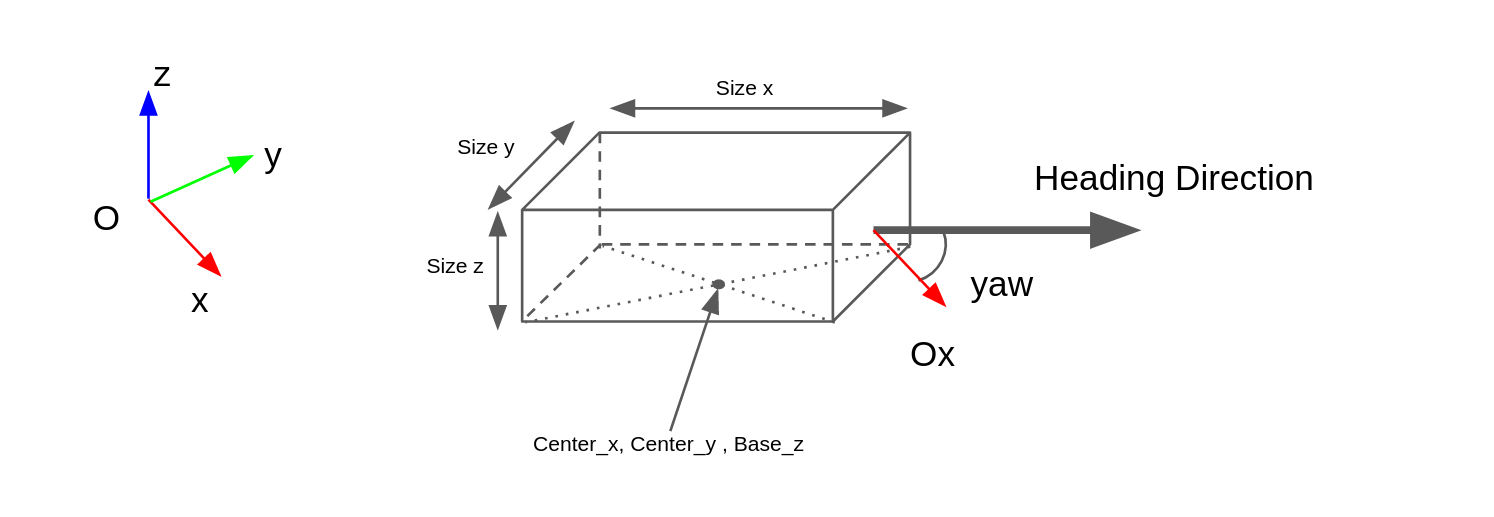
Bounding Box & Speed
- Position: Defined as the center of the bounding box expressed with (x, y, z) values.The center is defined at the center of the bounding box on the plane (O, , ) and z at the base.
- Direction: Heading or yaw is the angle between the longest side of the bounding box in the plane (O, , ) and the (O, ) axis, expressed in radians. This value is determined using information such as speed and previous trajectory. If the object is stationary, it can be flipped front to back.
- Size: Bounding box dimensions
- Size x: Length, the size of the Bounding Box parallel to the Direction
- Size y: Width, the size of the Bounding Box perpendicular to the Direction
- Size z: Height, the size of the Bounding Box along the axis. This is measured from the point where the Ground Margin (
Algorithm Components > Ground Detector > Level Ground Detector > Ground Margin) is added to the ground level.
- Speed: Provided along each (, , ) axis for a given object.
Types of Object Location
SENSR can output three types of locations(positions) for objects:
- Real-time location
- Previous positions per frame : Outputed as
historyin the object data. It's off as a default setting. Configurable inGeneral Settings > Tracking History. - Predicted positions per frame : Outputed as
predictionin the object data. It's off as a default setting. Configurable inGeneral Settings > Tracking Prediction.
Note: Activating history and/or prediction increases SENSR's resource consumption.