Map-based Calibration
Map-based Calibration is a tool that utilizes a 3D Map to achieve more precise calibration. By calibrating the LiDAR to match the accurate 3D Map, it enhances calibration accuracy and significantly reduces discrepancies when integrating with the coordinate systems of other devices. This feature proves highly beneficial in large projects that involve the installation of numerous LiDARs and Algo nodes.
note
Currently, this feature supports .ply format for 3D maps.
How to calibrate using 3D map
- Initially, a rough calibration is required to place each LiDAR into a roughly accurate position.
- Navigate to
Tool > Map Based Calibrationto initiate Map-based calibration. - Click
Loadand select a .ply file. Consequently, the 3D map will be loaded. Optionally, you can translate, rotate, or scale the 3D map to align it with your rough calibration.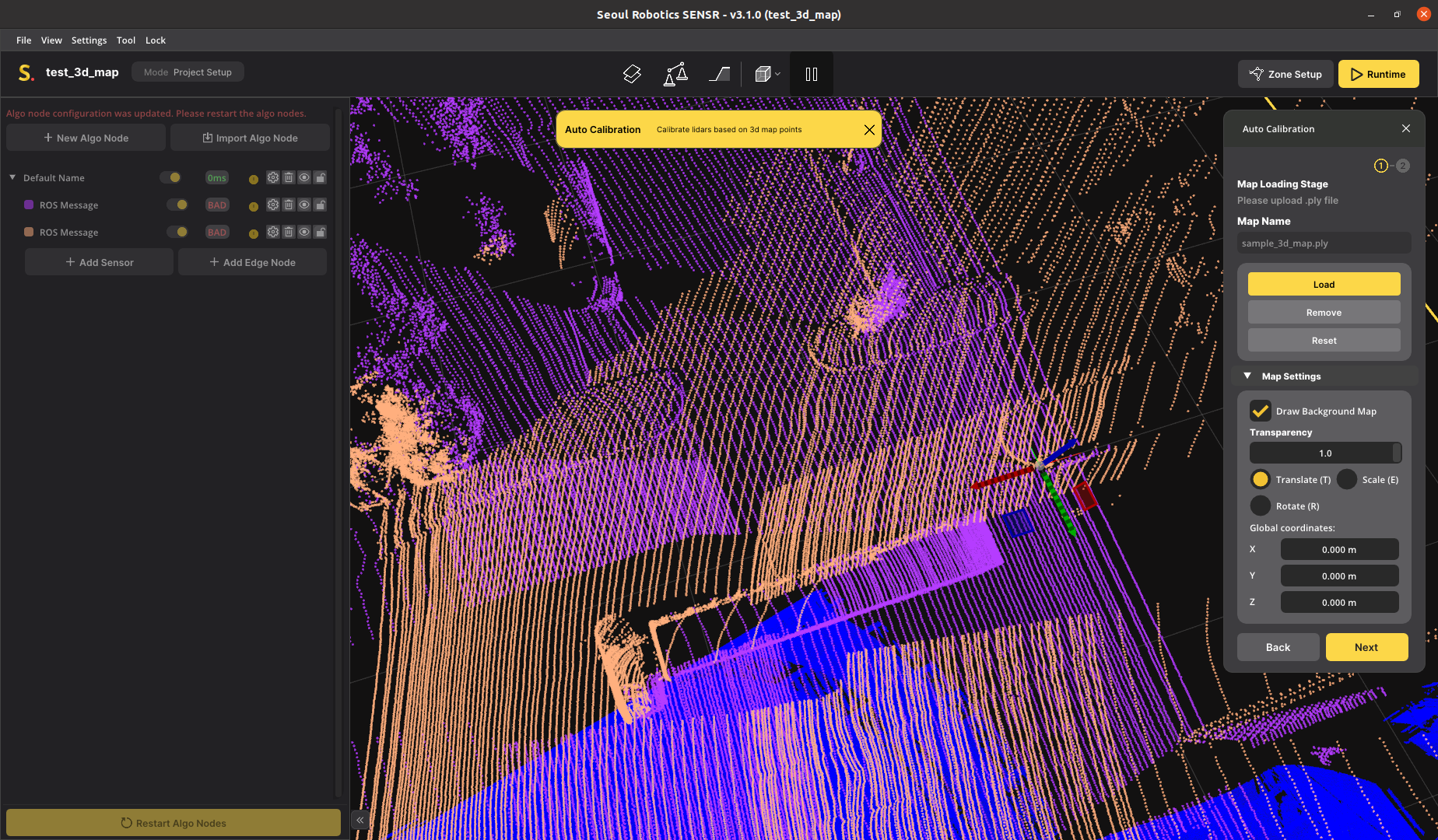
- Choose the points on the LiDAR that you want to calibrate.
- Click
Calibrate Selected LiDARorCalibrate Selected Algo Nodeif you aim to calibrate all LiDARs connected to the Algo node to which the selected LiDAR is connected.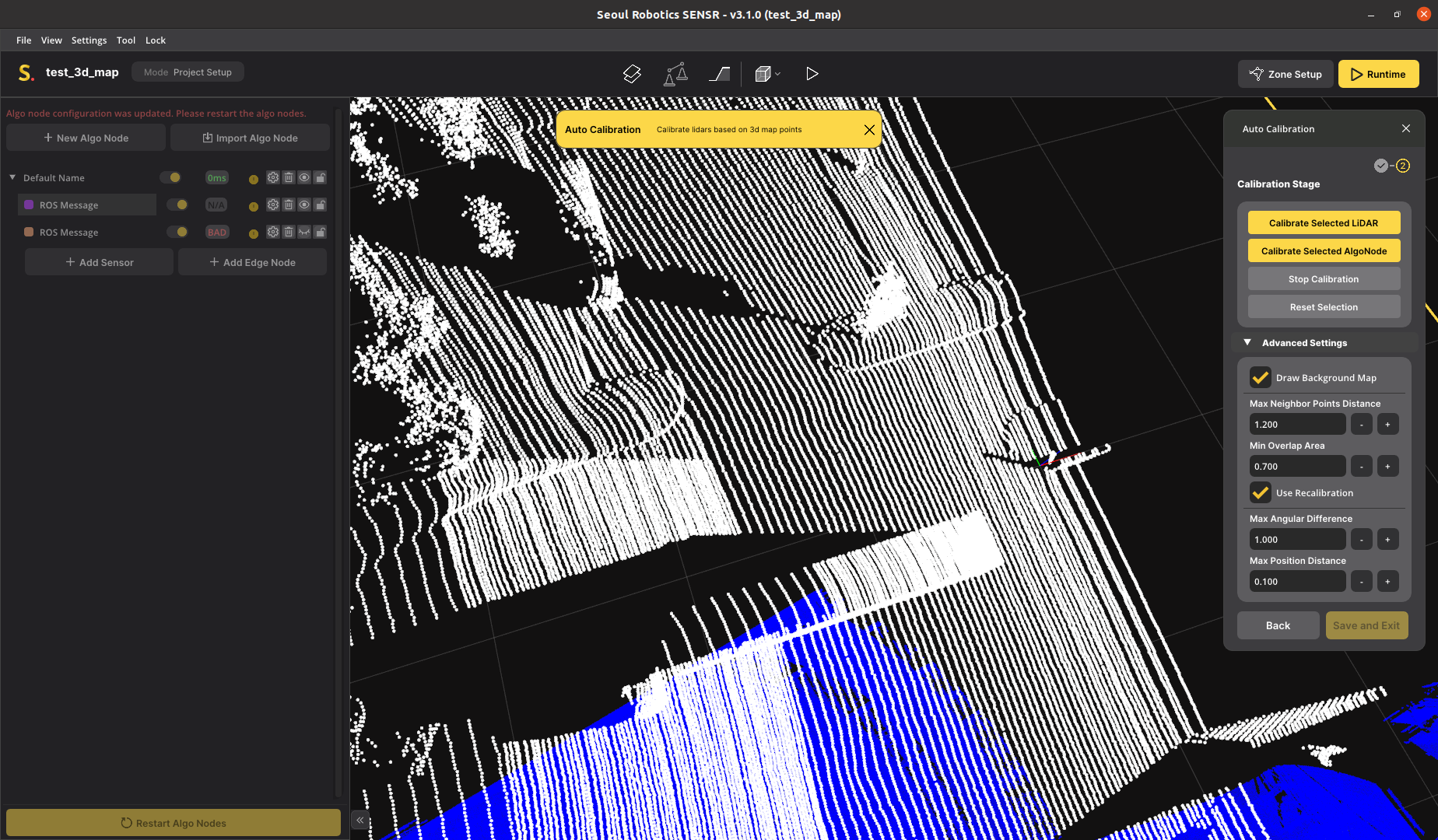
- Once the
Calibration Stagereaches 100%, you can apply the calibration by clickingSave and Exitif you are satisfied with the calibration status. Alternatively, you can continue the map-based calibration by repeating from step 4.